User Tools
SAFAR
![]() MobotSoft
MobotSoft
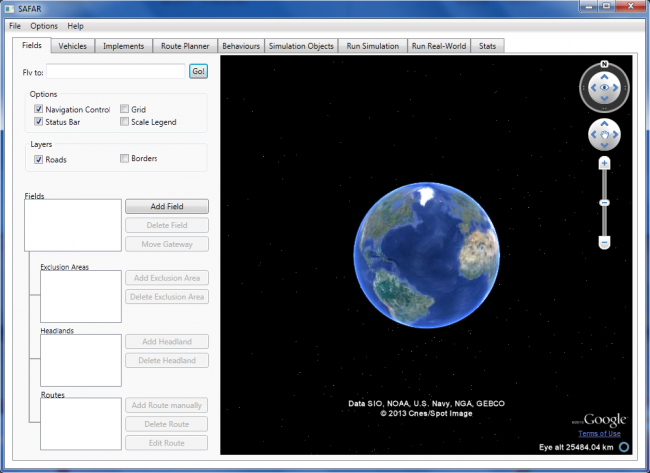
SAFAR is a joint project of UniBots and MobotSoft to build a Software Architecture For Agricultural Robots. With SAFAR, you can easily define your farm, including fields, vehicles, implements and routes. Then, SAFAR can run a realistic 3D physics simulation of your farm, or communicate to real vehicles to control them in real-time.
The ultimate vision of the SAFAR project is to create a fleet of truly autonomous agricultural vehicles to fulfil all the required agronomic functions of plant-scale precision farming operations, and thus realise all the cultural practices of various crop systems, in each case managed from a coordinating central farm office Management Information System (MIS).
The designed software includes a desktop application that integrates the use of Google EarthTM taking advantage of its services zooming in every area around the global. SAFAR also employs Microsoft Robotics Developer Studio due to its high degree of similarity and the congruence of its operation with that desired for the architecture to be built using it. This includes concurrency and a distributed object-oriented approach.